Real-time 6-DOF tracking of curved object using 4 cameras
 Movie of 6-DOF tracking (4 times fast forwarded)
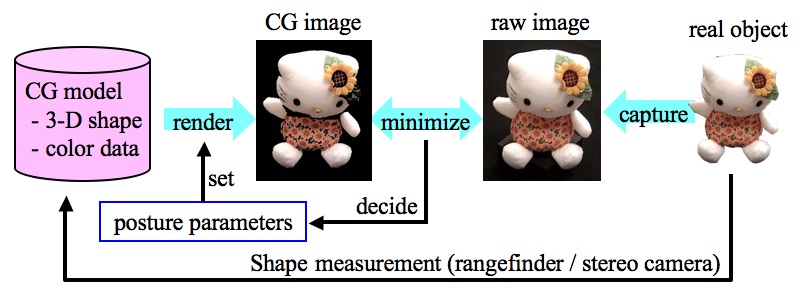
Movie of 6-DOF tracking (4 times fast forwarded)We propose a model-based method using intensity images taken with multiple viewpoint cameras connected to PC cluster system. At first, the whole 3-D shape and reflectance model of the ob ject are prepared using rangefinders. Each rangefiner is constructed with a camera, pro jector and PC, and all PCs are connected via network each other. For tracking the ob ject, several CG images with varied ob ject pose and position are generated in each PC using the ob ject model, and then compared to the input intensity image in parallel. The result of the comparison is transferred to a master PC, and the pose and position of the ob ject are estimated by minimizing the residual of the CG and input images. We made a special CG generator which is a precise simulator of the real camera to generate a CG image identical to the input image. We confirmed the ability of our method and achieved a 6DOF real-time ob ject tracking system using four cameras in the rate of 5 frames/sec.
Real-time 6-DOF tracking and modeling (SLAM) using stereo camera
 Movie of 6-DOF tracking
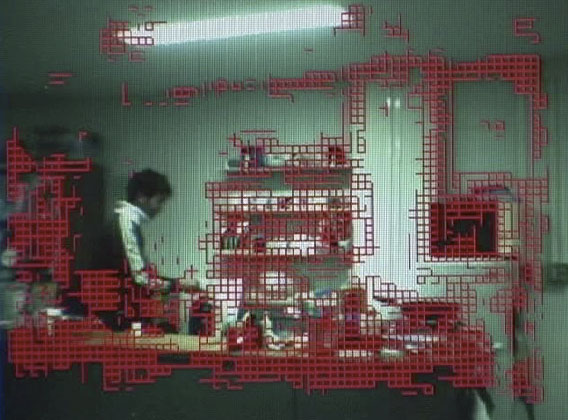
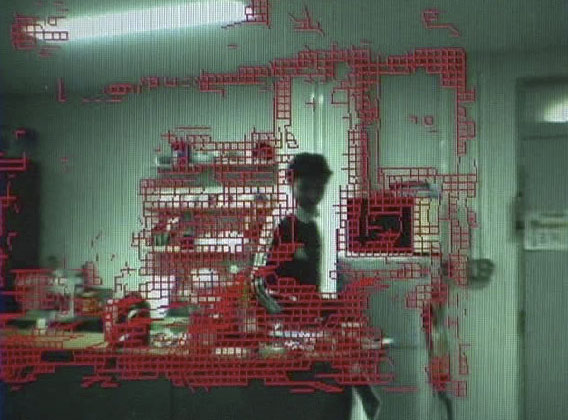
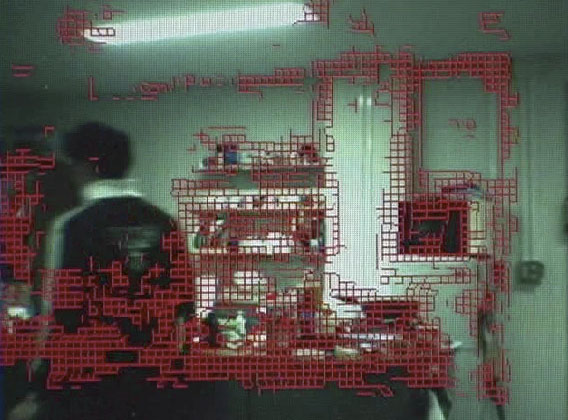
Movie of 6-DOF trackingWe propose a method to determine the 3-D structure of the scene and camera motion simultaneously using stereo camera. The shape of the scene is measured by usual stereo method, and it is used to track the motion of the camera in real-time. The position and posture of the camera are calculated by minimizing difference between input image and CG image which is rendered from measured 3-D shape of the scene. If the field of view is changed enough, the 3-D measurement of the scene is activated. The computational load of stereo matching is so heavy that we must avoid the performance degradation of motion tracking while stereo measurement to make the tracking enough precise and sta- ble. Therefore, we parallelized two processes, and propose some ingenious methods to refine the estimated camera motion. In experiments, we confirmed that stable and precise tracking and modeling are realized without interference of intermittent modeling process activation.
Real-time tracking of mirrored surface
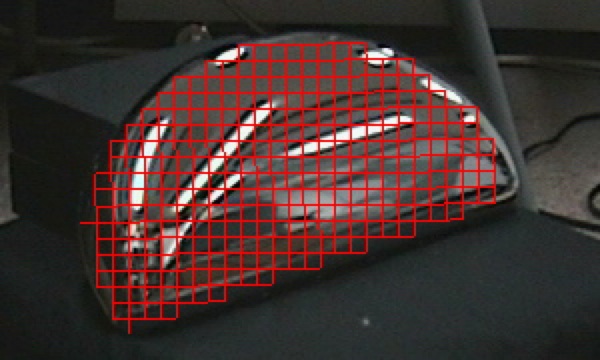
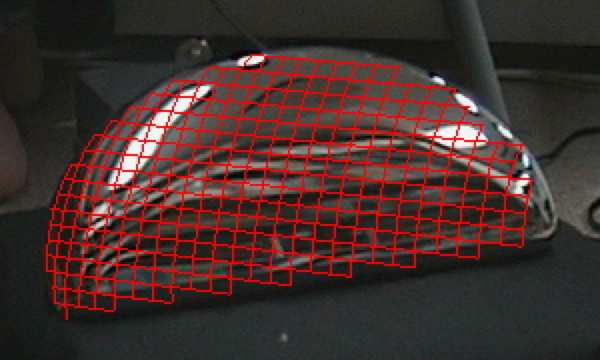
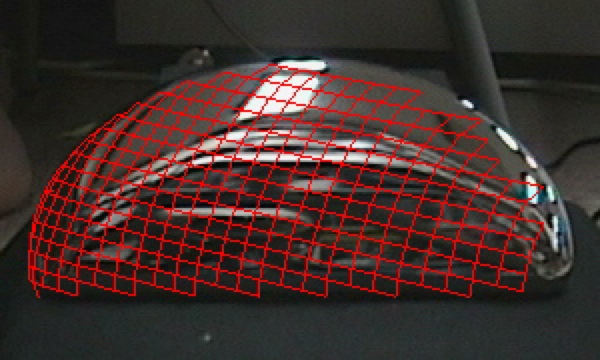
High-light of specular objects causes errors in video tracking. Especially, very bright area caused by the reflection of light source may erase interest points in feature-based methods. In order to overcome the problem, we propose an appearance-based method which estimates the position and posture of a target object by minimizing the difference between an input image and CG images rendered from the model of object and environment. Lighting condition of environment is modeled by the sphere mapping technique, and used for rendering images with precisely measured object shape on graphics accelerator hardware. In experiments, we confirmed that mirror-finished object is tracked accurately in half of video-rate.

Spherical mirror for environment (lighting) modeling, white object for shape measurement, mirrored object as tracking target