Real-Time Tracking of Free Form Object using high-speed rangefinder
The motion of the object is tracked by using real-time rangefinder named "Silicon Range Finder".
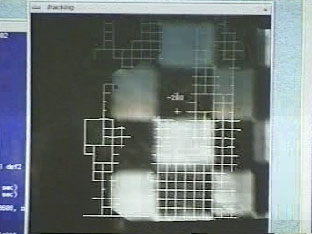
The rangefinder has only 24 x 24 pixels but takes range image sequence at more than 30 frames per second.
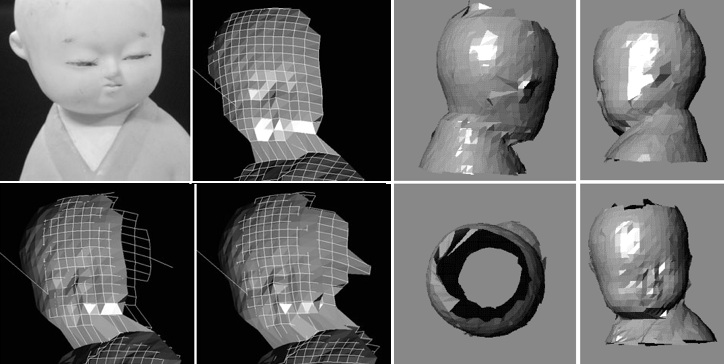
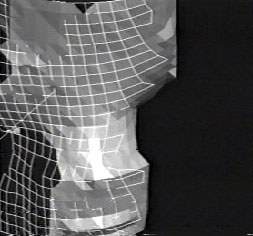
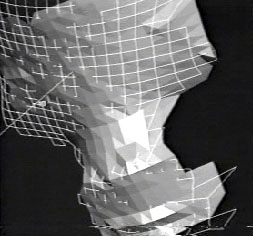
We Track the motion of the object by minimizing the difference between real and generated range images.
At first, the shape of the object is measured and stored, and then an image is rendered by using
graphics hardware. To track the motion of the object, the value depth buffer is read out and compared
for minimizing the difference between real and generated range images. Also the intensity images are
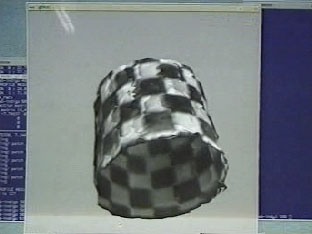
combined with this system to track the motion of the object more stably. If new part of the object
appears while tracking, the part is added to the model, therefore, the whole shape of the object
is simultaneously modeled automatically under the arbitrary motion of it.
See also :
- Shinsaku Hiura, Akashi Yamaguchi, Kosuke Sato and Seiji Inokuchi: Real-Time Tracking of Free Form Object Based on Measurement and Synthesis of Range Image Sequence, Systems and Computers in Japan, Vol.30, No.5, pp. 56-64 (May 1999)
- Shinsaku Hiura, Akashi Yamaguchi, Kosuke Sato and Seiji Inokuchi: Real-Time Tracking of Free Form Object by Range and Intensity Image Fusion, Systems and Computers in Japan, Vol.29, No.8, pp. 19-27 (Jul. 1998)
- Shinsaku Hiura, Kosuke Sato and Seiji Inokuchi : Range Image Processing using Graphics Accelerator, Proc. of Japan-USA Symposium on Flexible Automation, 955-958 (Jul. 1996 at Boston)
- Shinsaku Hiura, Akashi Yamaguchi, Kosuke Sato and Seiji Inokuchi: Real-Time Object Tracking by Rotating Range Sensor, Proc. of 13th ICPR, Vol.I 825-829 (Aug. 1996 at Vienna)
 Movie of real-time 6-DOF tracking
Movie of real-time 6-DOF tracking