Preparing and running system using three camreas
 |
   |
 video : Preparing and running systems
video : Preparing and running systems
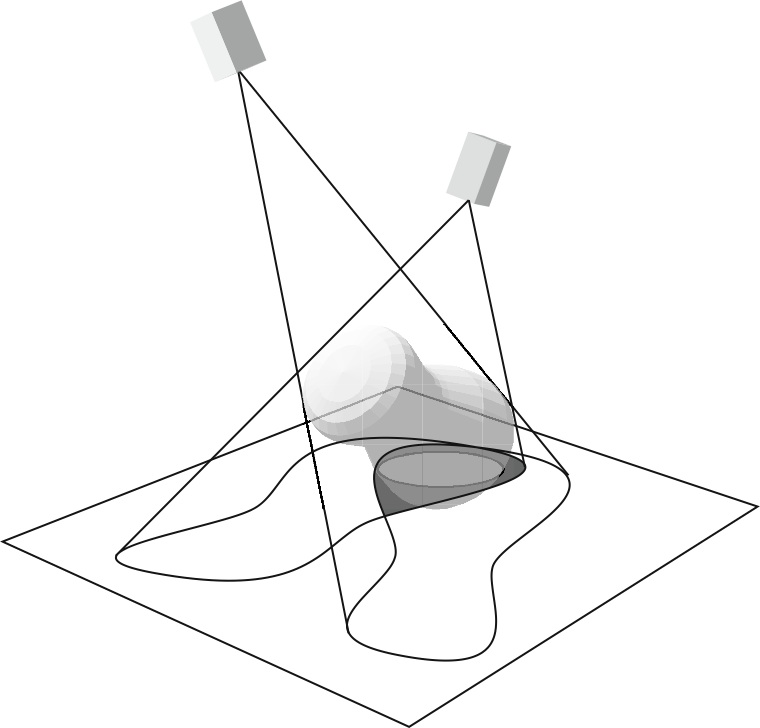
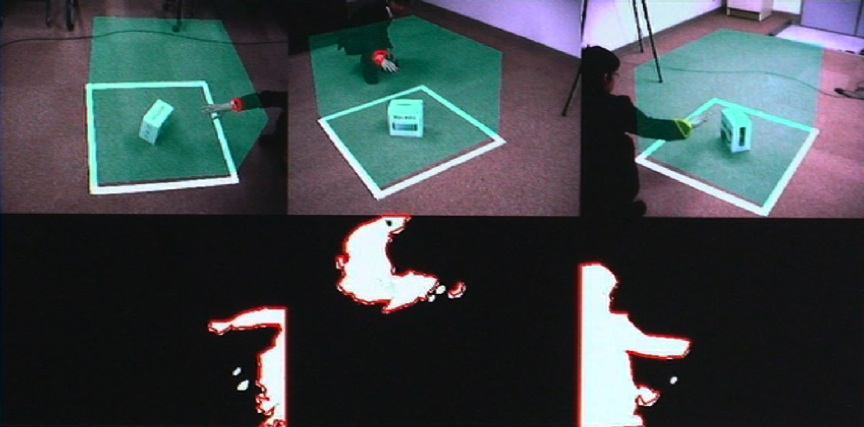
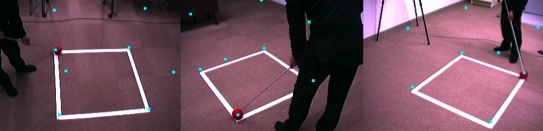
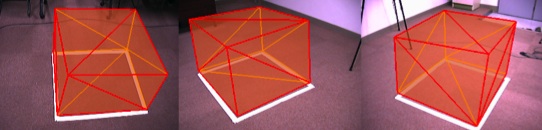
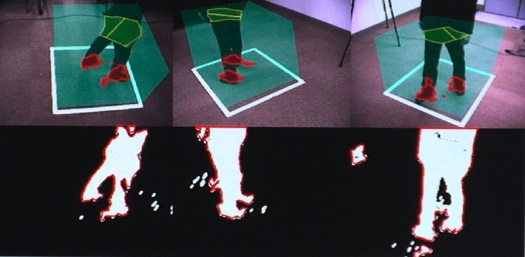
We propose a practical intrusion detection system using uncalibrated multiple cameras. Our algorithm combines the contour based multi-planar visual hull method and a pro jective reconstruction method. To set up the detection system, no advance knowledge or calibration is necessary. A user can specify points in the scene directly with a simple colored marker, and the system automatically generates a restricted area as the convex hull of all specified points. To detect an intrusion, the system computes intersections of an ob ject and each sensitive plane, which is the boundary of the restricted area, by pro jecting an ob ject silhouette from each image to the sensitive plane using 2D homography. When an ob ject exceeds one sensitive plane, the pro jected silhouettes from all cameras must have some common regions. Therefore, the system can detect intrusion by any ob ject with an arbitrary shape without reconstruction of the 3D shape of the ob ject.
Preparing and running system using three camreas
video : Preparing and running systems
|