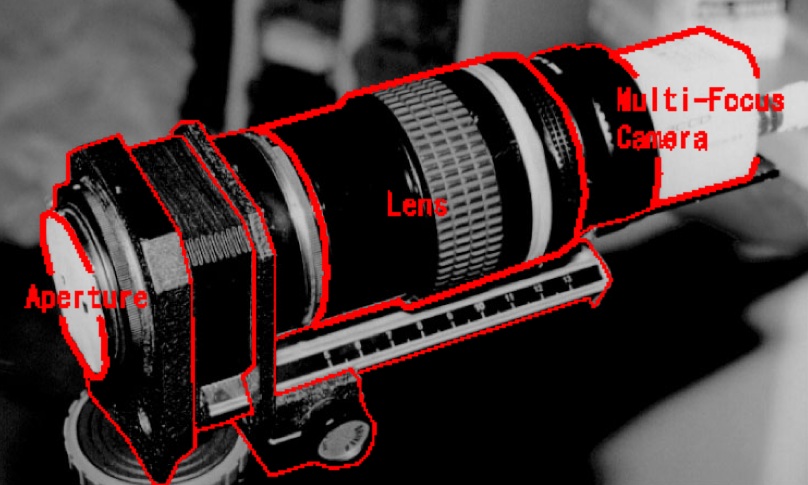
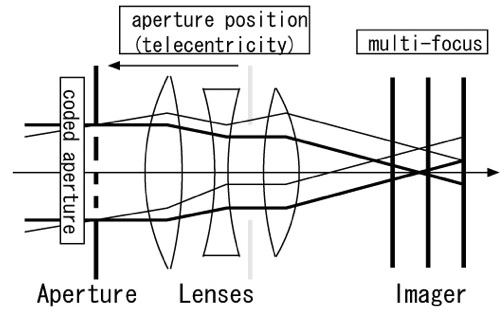
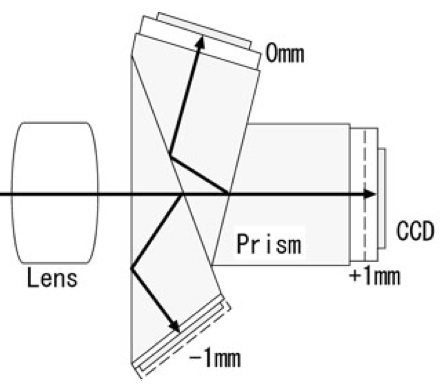
We proposed two ideas to make a practical depth from defocus (DFD) method. In particular, we focused on the issues of robustness of calculation and and compactness of ecquipment. At first, we introduced the multi-focus camera, which is a novel compact image sensor for depth from defocus (DFD) range measurement. Although it is as small as an usual CCD camera, it can capture three images focused on different distances simultaneously. Then we introduced a coded aperture to make the method more robust. That optics make it possible to design and control the characteristics of the blurring, so the robustness and simplicity of the depth estimation algorithm are significantly improved. To prove that principle, we tried to use two types of optics and corresponding analysis algorithms. The former method utilizes 1D Fourier analysis to acquire a depth map and a all-in-focus image from three defocused images taken with a pair of pinholes. The latter one is based on the spatial domain computation using 2D convolution for fast and precise depth measurement using a coded aperture with several pinholes. Since the camera has NTSC color video signal as a output , and also our proposed methods with coded aperture are robust enough for noisy recorded images, it is possible to measure a moving object by recording the sequences of three images. Fast image processor also enables to compute the depth map in real-time. Simplicity and parallelism of our method help to implement our algorism on massive parallel SIMD processor array. Experimental results showed that the multi-focus camera works well as a practical DFD range sensor and that the coded apertures much improve its range estimation capability for real world scenes.
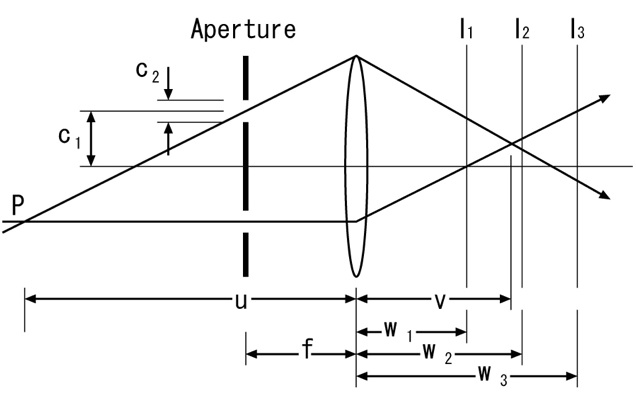
Designed characteristics of defocus using coded aperture
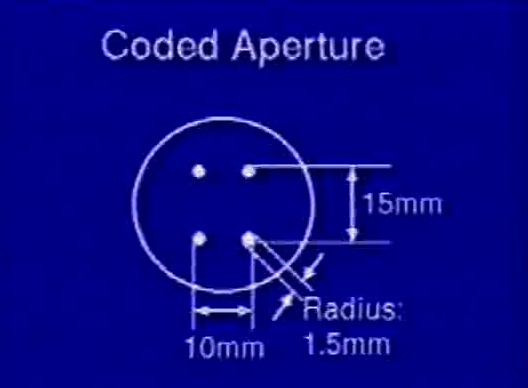

Coded aperture preserves information in high frequency domain while the image is much blurred without changing the image magnification ratio.
|
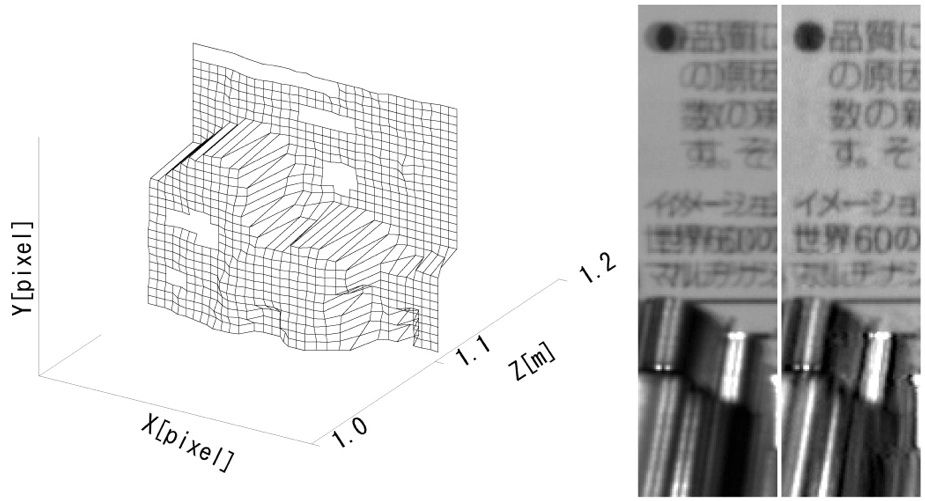
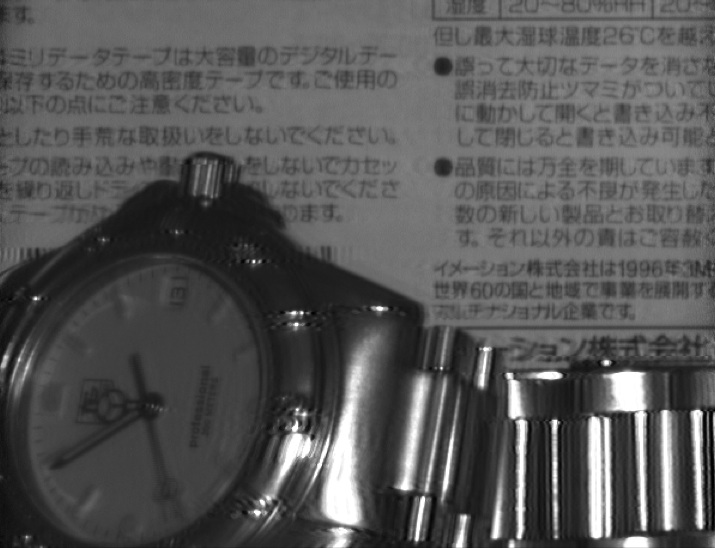
Reconstruction of both range map and all-in-focus images using frequency domain analysis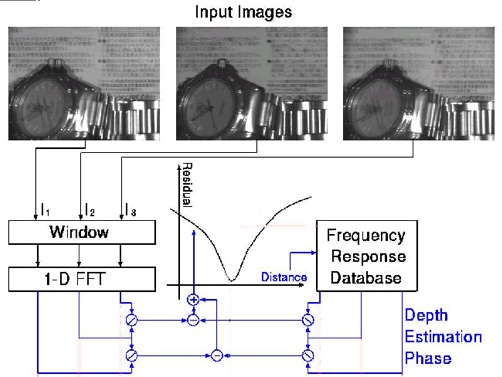
 We used an aperture with two pinholes to avoid using 2-D FFT (Please remenber, the work was done during 1997-1998). All-in-focus image can be reconstructed stably by applying Inverse filter to three images.
|
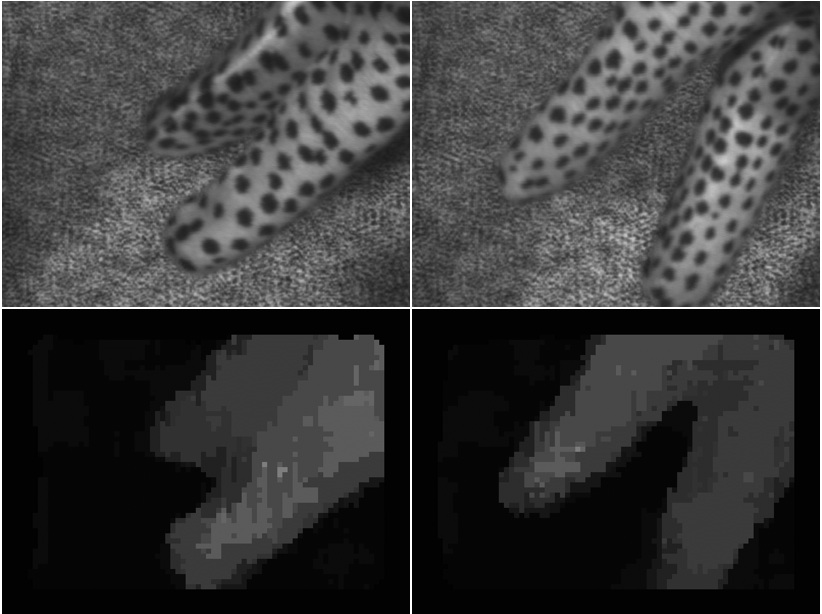
Estimating range value using combolution with 2-D blur kernel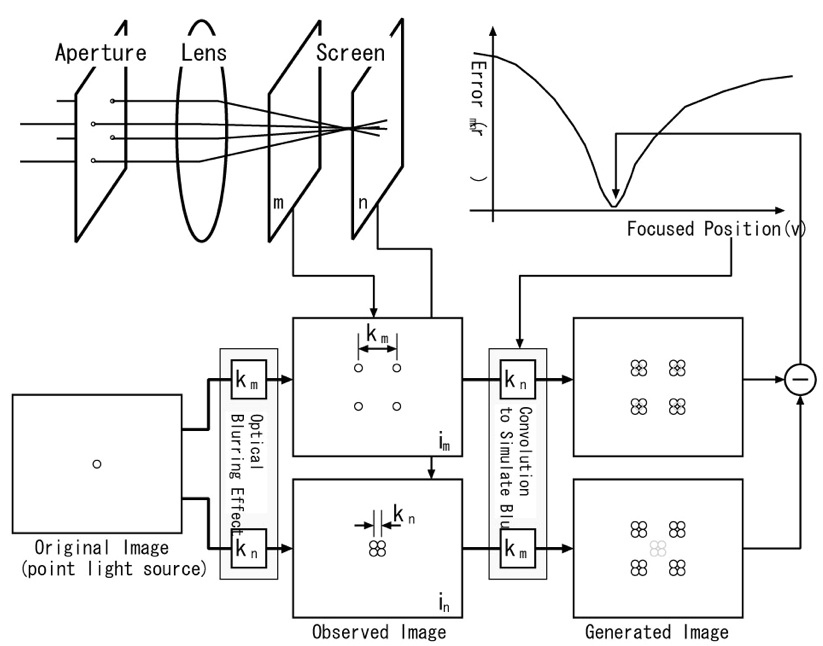 Because of the commutative law of combolution, we can find identical images from two images through the process illustrated above if the estimated depth is correct. If the blur kernel is not coded, such double combolution loses imfomation at all and range estimation may be impossible. Contrary, the coded aperture enables depth estimation using such a very simple method.
|
 Movie
Movie